深圳掃地機器人維修 掃地機器人下式傳感器故障排查及修理
深圳掃地機器人銷售維修 掃地機器人下式傳感器故障排查
2024-07-22 06:57 掃地機器人維修
一、下式傳感器的作用原理
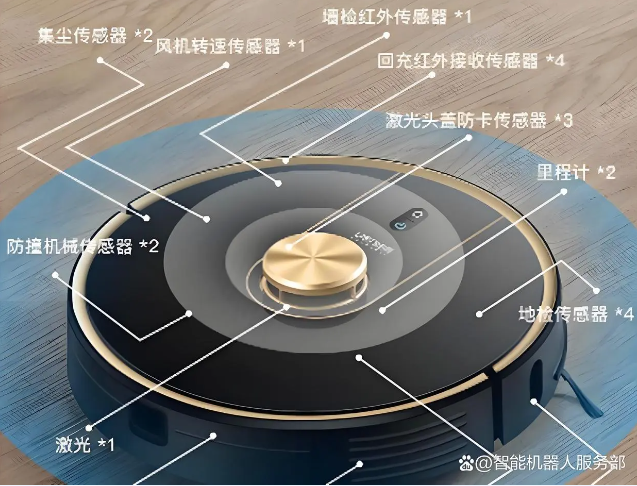
下式傳感器是掃地機器人中的關鍵部件之一,用于探測機器人下方是否有障礙物。其原理是利用超聲波探測器發射超聲波,并通過回波計算出障礙物與機器人之間的距離,從而控制機器人的運動。
二、故障現象
如果下式傳感器出現故障,會導致機器人無法正常探測到下方的障礙物,從而無法正確地避開障礙物,進一步導致機器人在清掃過程中出現異常。具體的故障現象如下:
1. 機器人隨機撞墻或卡住,無法繼續清掃;
2. 機器人在清掃過程中發生跌落事件;
3. 機器人在清掃過程中停止工作,顯示“地面不平”或“清潔器故障”等報錯信息。
三、解決方法
針對不同的故障現象,可以采取不同的解決方法。下面是一些常見的排查及維修方法:
1. 拆卸清潔。首先將機器人翻轉,取出底部滾刷以及下方的傳感器,對其進行清潔。尤其是傳感器上的沉積物或者灰塵等會導致探測距離減小或者探測誤差增大,這時需要及時清潔。
2. 調整清掃高度。根據環境的不同,需要調整機器人的清掃高度,從而避免機器人誤判。
3. 更換傳感器。如果以上方法都無法解決問題,那么就需要更換下式傳感器。
總的來說,下式傳感器故障不僅會影響機器人的清掃效率,也可能會威脅到家中的安全。因此,及時排查故障,并有針對性地維修,是非常重要的。